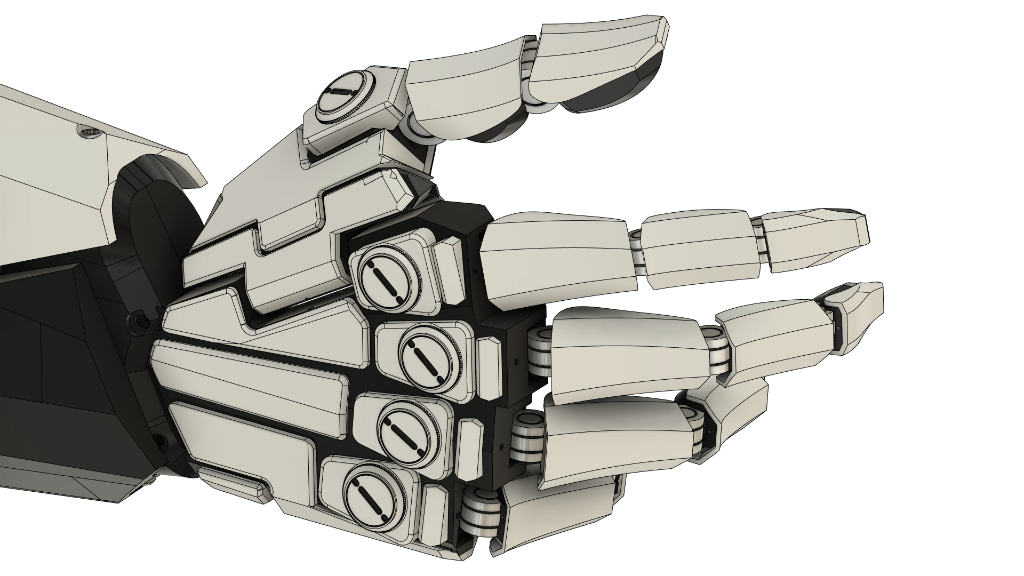
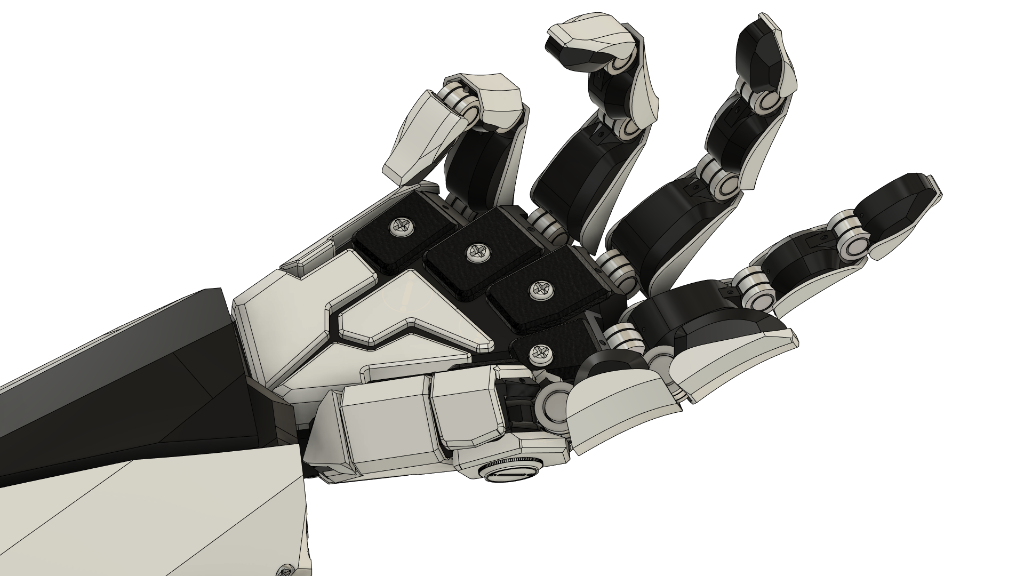
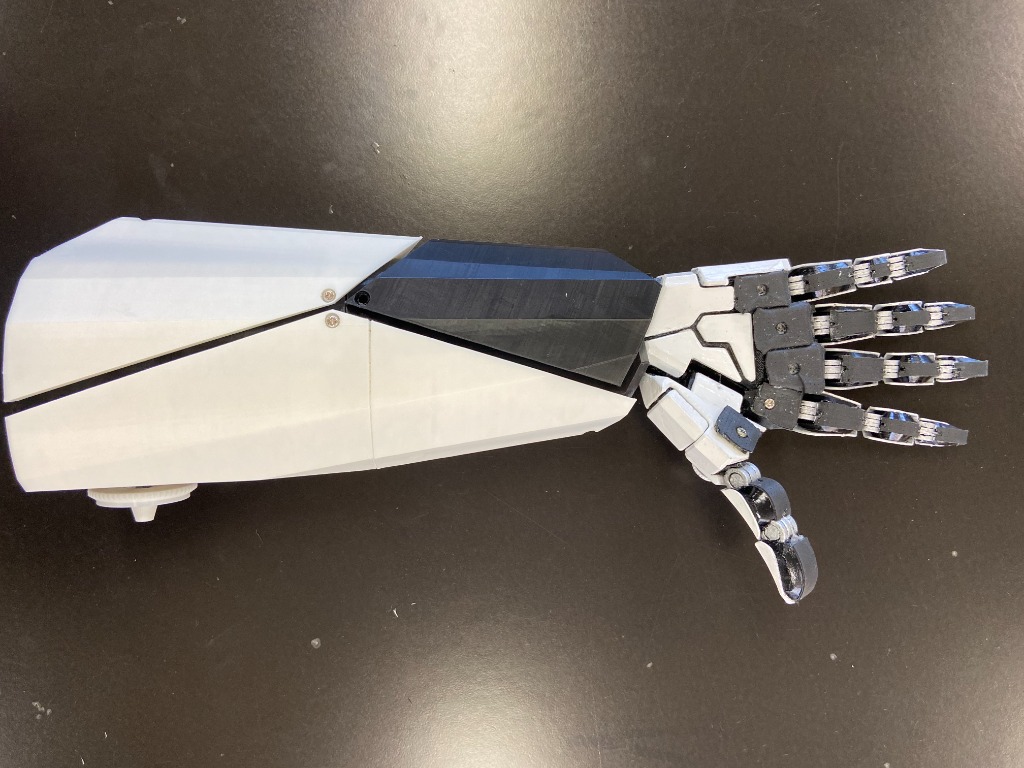
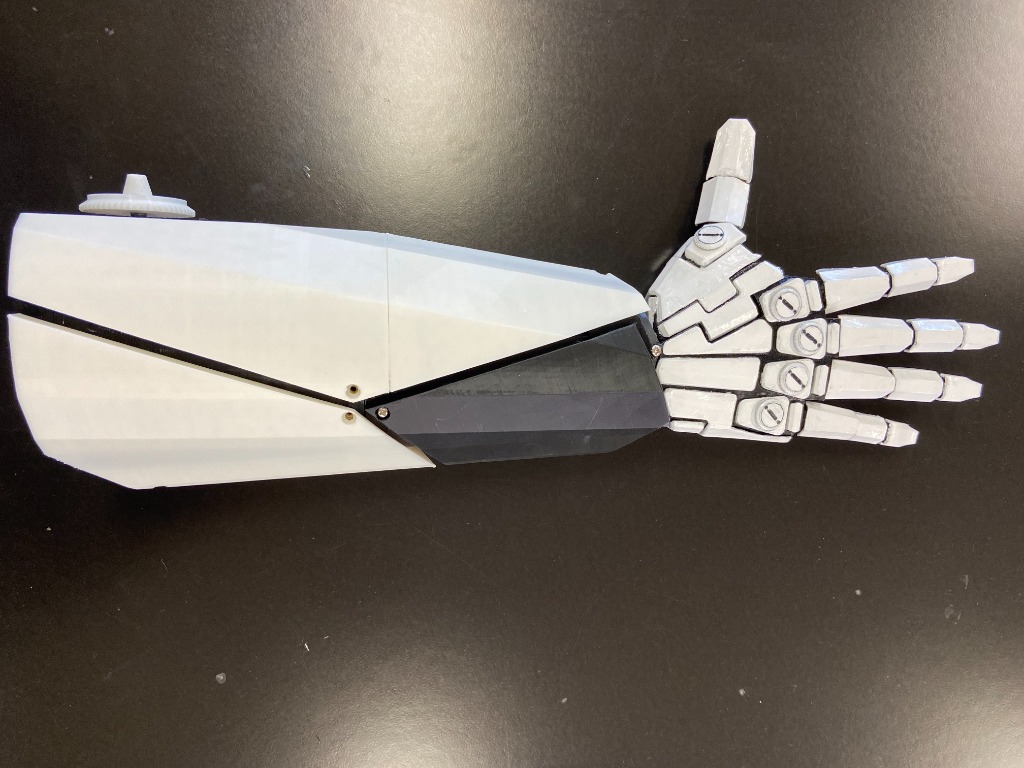
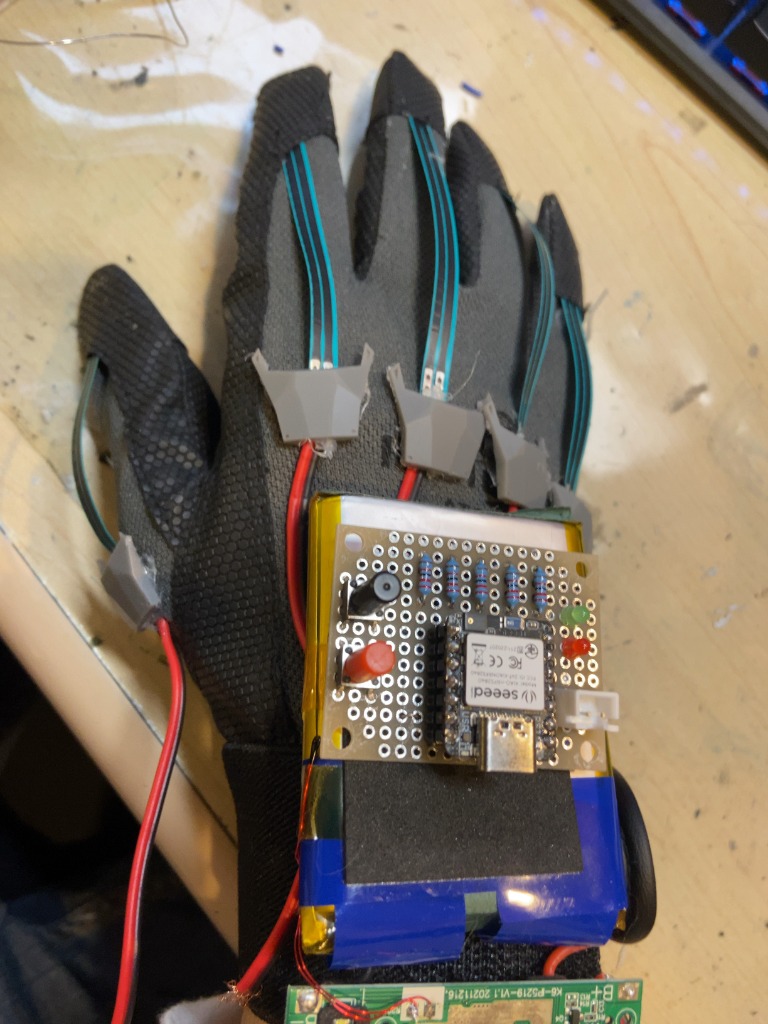
データグローブとロボットハンド
完成
© CC BY 4+
2127
高校生の時に作ったロボットハンドを改造したものと、それを遠隔操作できるデータグローブです。
-
 ファイナリストMouser Make Awards 2023
ファイナリストMouser Make Awards 2023
- 動画
-
- 開発素材
- システム構成
-

- ストーリー
-
- メンバー
-
-

- かいと @robot_kaito
-
-
- 関連イベント
-
-
 Mouser Make Awards 20232023-05-01 開催
Mouser Make Awards 20232023-05-01 開催
-
 NT東京2023:出展作品(一部|非公式だよ)2023-11-04 開催
NT東京2023:出展作品(一部|非公式だよ)2023-11-04 開催
-
- 関連リンク
-

-
-
- 同じニオイがする作品
-
-
 卓上歩行ホビーロボ(うずら)
卓上歩行ホビーロボ(うずら)
-
 opniz
opniz
-
 動く1/11園丁型ロボット兵つくってみた
動く1/11園丁型ロボット兵つくってみた
-
 RumiCar-C3
RumiCar-C3
-
Proto lovers ♥










<一次審査通過作品>栗原さん:エンジニアリング上の工夫が素晴らしい。同じ勢いで、人体の多くの箇所を模倣したロボットが作れるのではないかなという想像が膨らみ、いつか完全自作のヒューマノイドロボットを完成させてほしいと期待が膨らみました。(講評を事務局が代筆)