Mercury’s Boots
開発中
© CC BY 4+
860
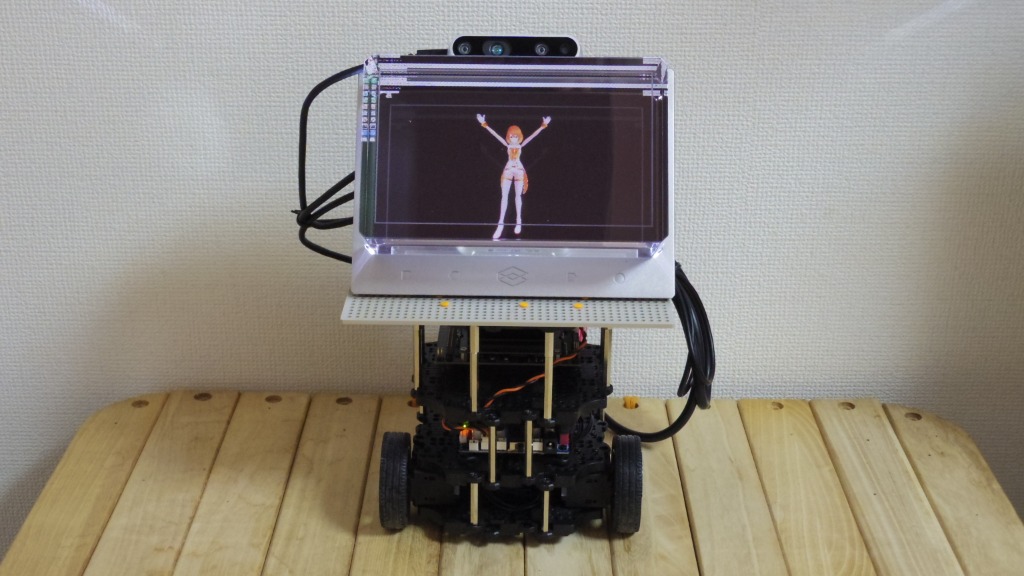
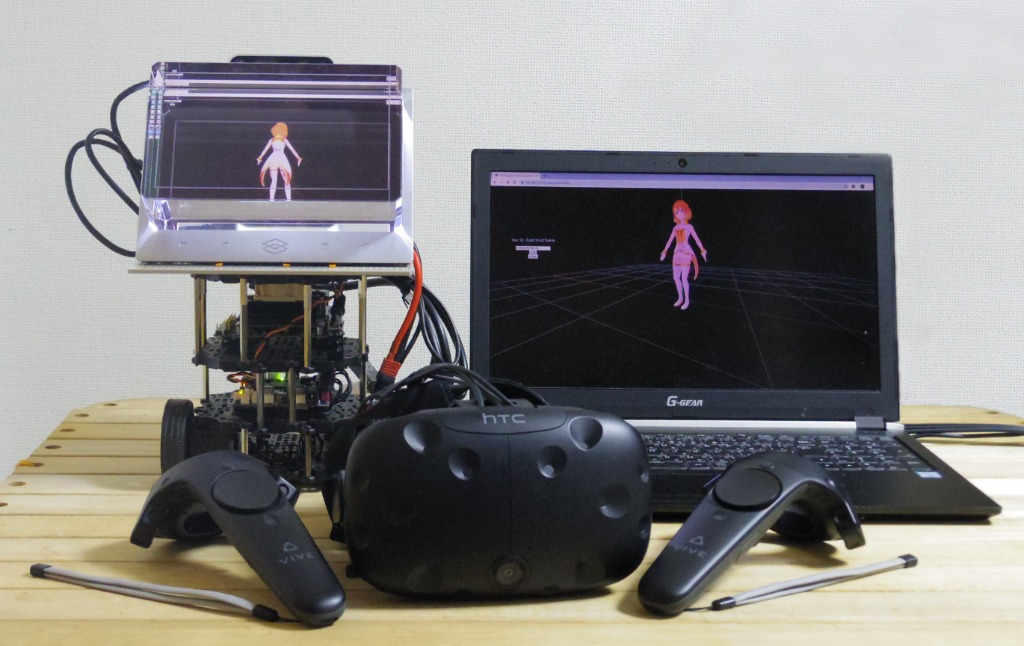
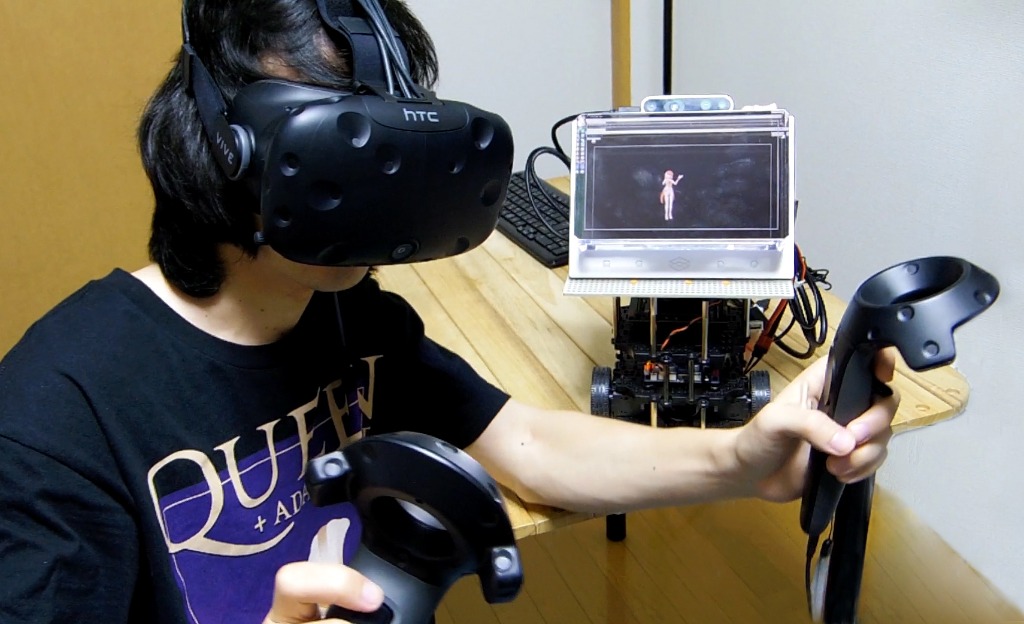
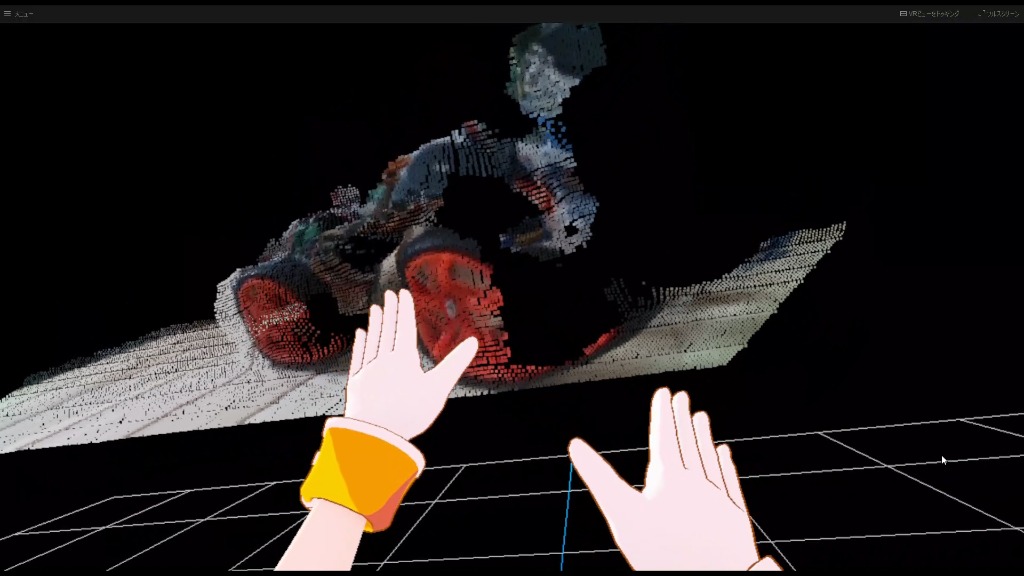
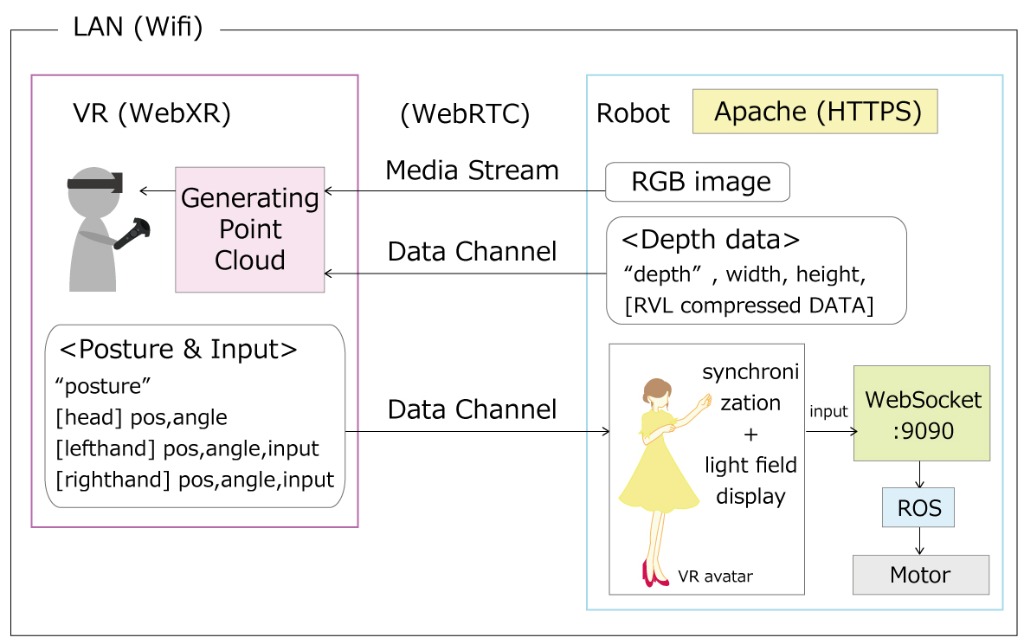
VRアバターを現実に呼び出す新しい小型テレプレゼンスロボットです。このロボットはまさしく、VR体験者が現実で動き回り、周囲の人々と対話するための「足」といえるでしょう。

- 動画
-
- 開発素材
-
ガジェット
- システム構成
-
- ストーリー
-
- メンバー
-
Revetronique
-

- Revetronique @reve_tronique
-
- テスト
- 動画制作
- 企画
-

- 戸田 光紀 (Revetronique) @koki_t
-
- ハードウェア設計
- ソフトウェア開発
-
- 関連イベント
-
-
 ヒーローズ・リーグ オンライン20202020-09-07 開催
ヒーローズ・リーグ オンライン20202020-09-07 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 Arrival 🚪 ChatGPTとノックでコミュニケーション
Arrival 🚪 ChatGPTとノックでコミュニケーション
-
 体感型AR/MRゲーム!ユニティちゃん Magic Leap ホッケー!
体感型AR/MRゲーム!ユニティちゃん Magic Leap ホッケー!
-
 Cube Scrambler
Cube Scrambler
-
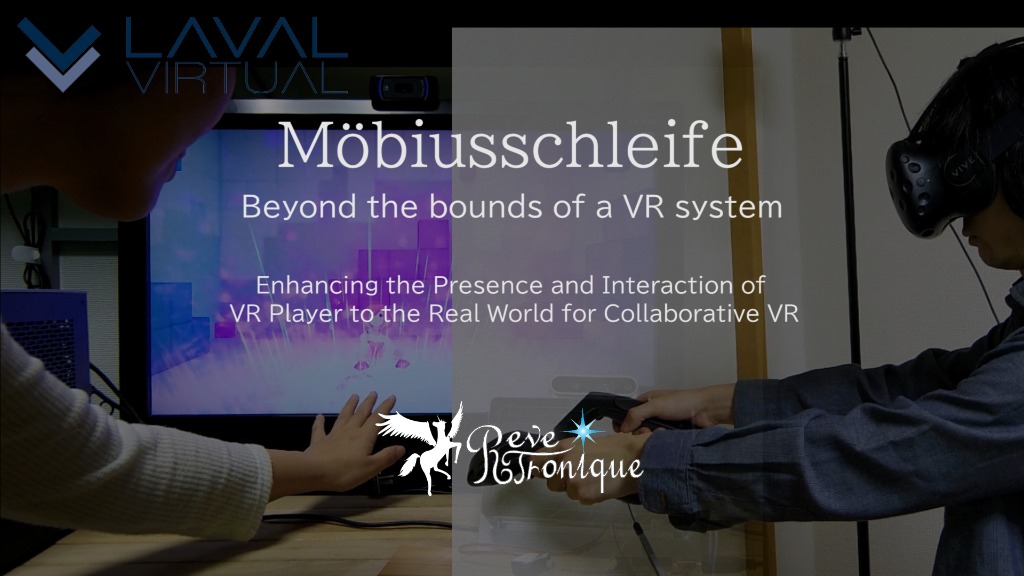 Möbiusschleife: Beyond the Bounds of a VR System
Möbiusschleife: Beyond the Bounds of a VR System
-
Proto lovers ♥







テレプレゼンスコミュニケーションの場合、3D×3Dの世界にはなりにくいという現在状況へ問いかけるような作品。
圧倒的な実装によって生み出されたプロトタイプは、新しい体験と問いかけを生み出しそう。
VRアバターの現実化。。。とてもいい。