YOLOを使ったスマートロックBOX
開発中
© CC BY 4+
246
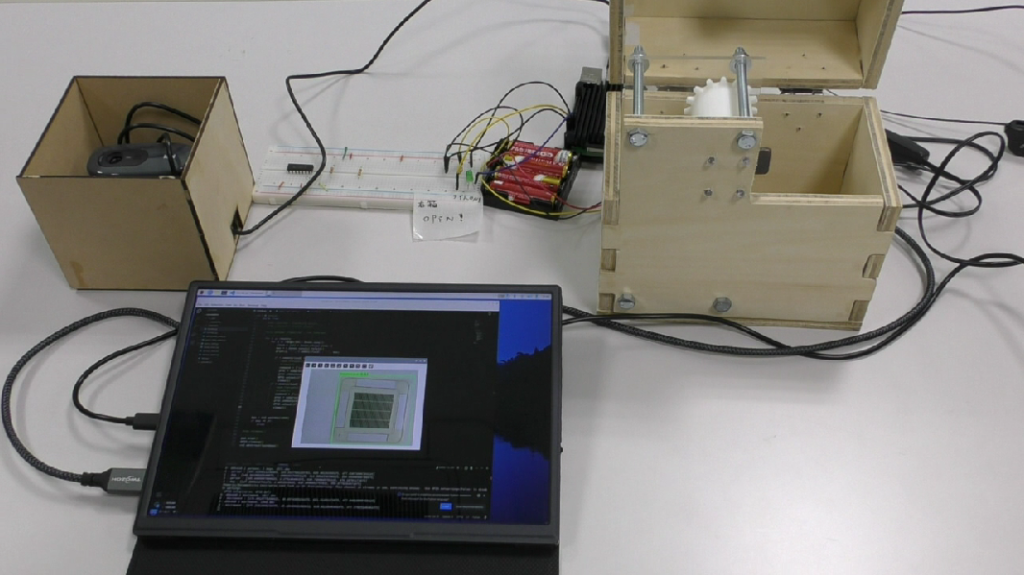
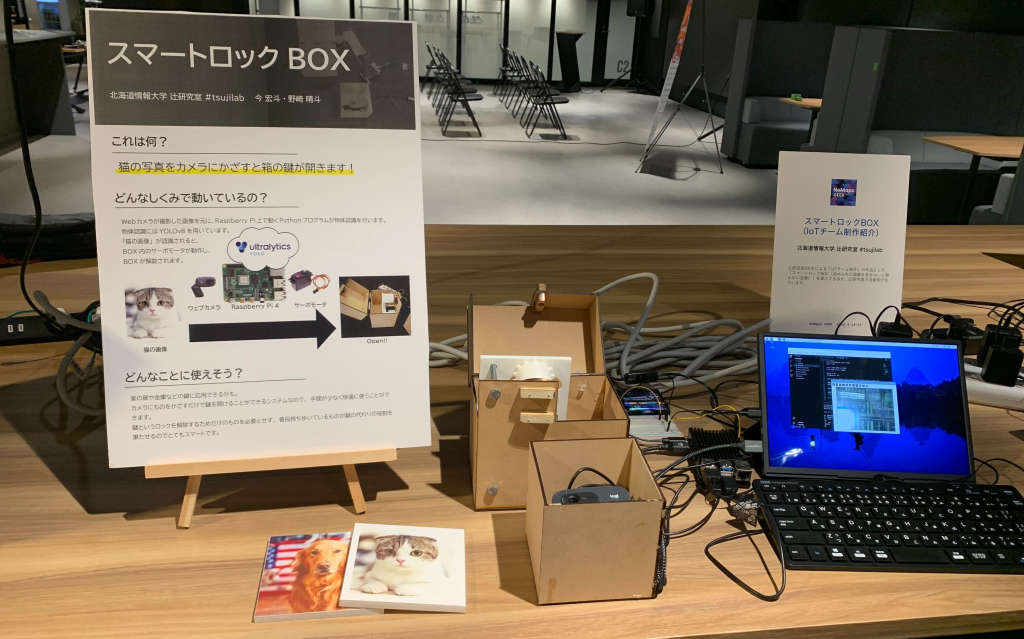
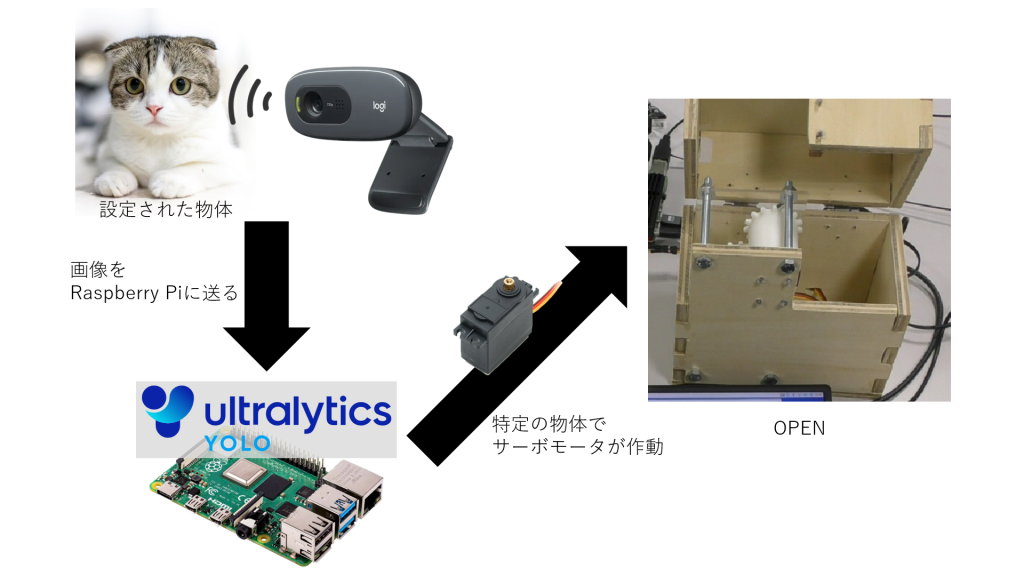
特定の物体をカメラに認識させることで、サーボモータが作動し鍵が解錠・施錠されるシステムです。

- 動画
-
- 開発素材
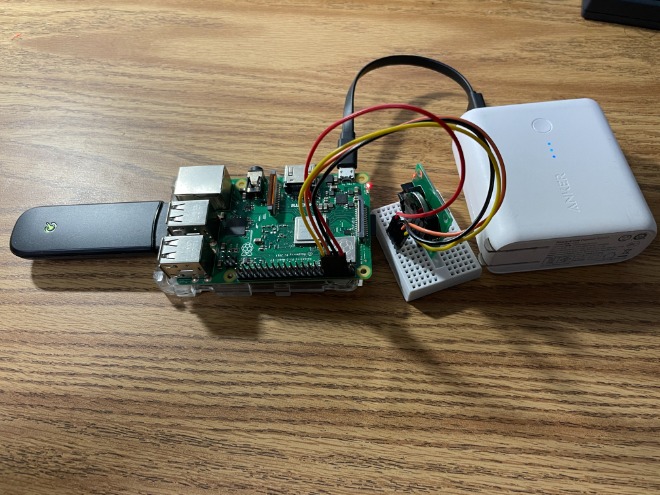
- システム構成
-
- ストーリー
-
- メンバー
-
ミミック
-

- hiroto @hiroo
-
- リーダー
- プログラミング
- 筐体作成
-
- 野崎晴斗 @n_haruto_zzz
-
- デザイン
- 筐体作成
-
- 関連イベント
-
-
 ヒーローズ・リーグ 20242024-09-02 開催
ヒーローズ・リーグ 20242024-09-02 開催
-
 アバナードHuman Impactリーグ2024-09-02 開催
アバナードHuman Impactリーグ2024-09-02 開催
-
- 同じニオイがする作品
-
-
 段ボール製Raspberry Piケース 簡易版
段ボール製Raspberry Piケース 簡易版
-
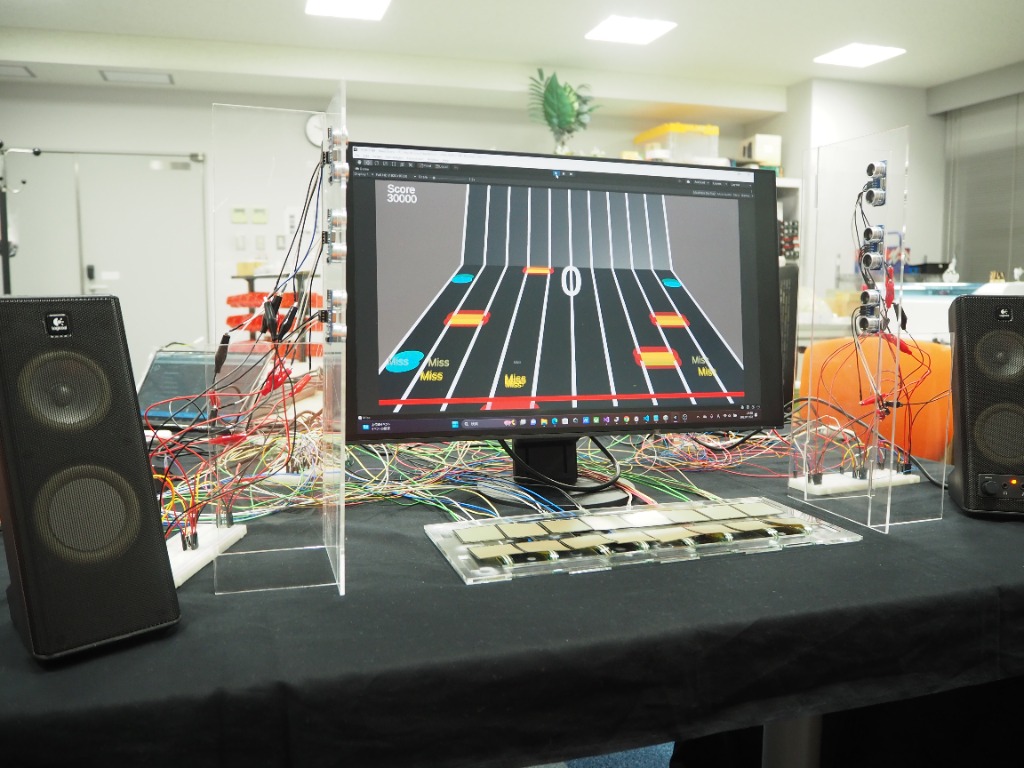 センサーを使ったリズムゲーム
センサーを使ったリズムゲーム
-
 アルコールを取り始めると、飲み始めた場所が家族に通知されるシステム
アルコールを取り始めると、飲み始めた場所が家族に通知されるシステム
-
 昭和育ちなおっさんたちは黒電話を携帯する夢を実現する...
昭和育ちなおっさんたちは黒電話を携帯する夢を実現する...
-
Proto lovers ♥