ATOM Mate for toio で障害物回避
完成
© CC BY 4+
433
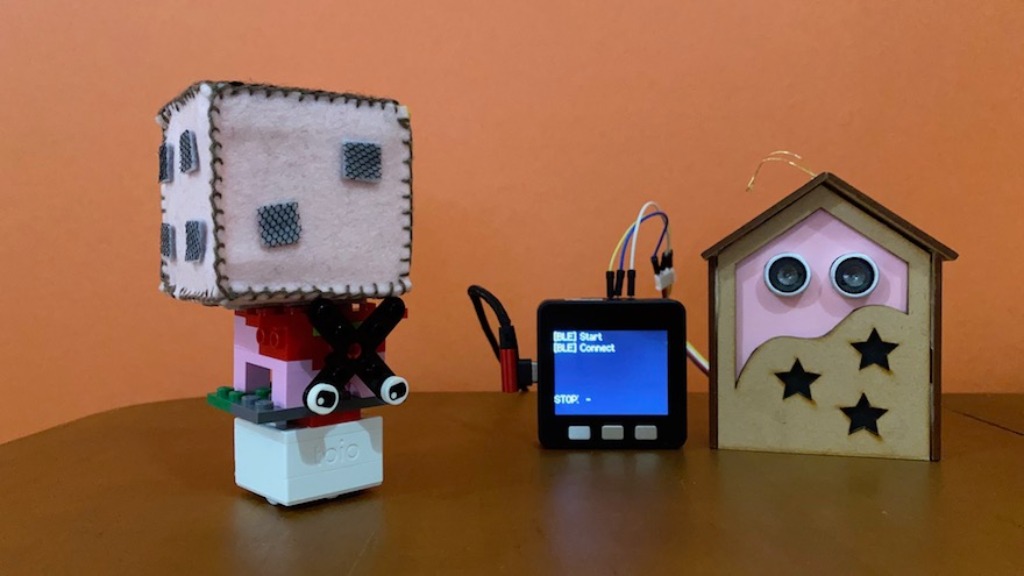
toio マットに乗せるとランダムに移動し、障害物が正面にあると逆側に回避します。Unity を活用。

- 動画
-
- 開発素材
-
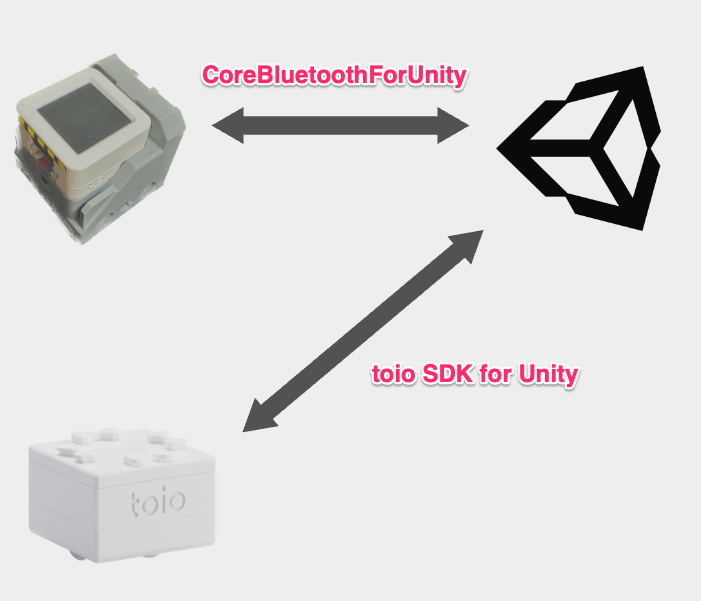
- システム構成
-
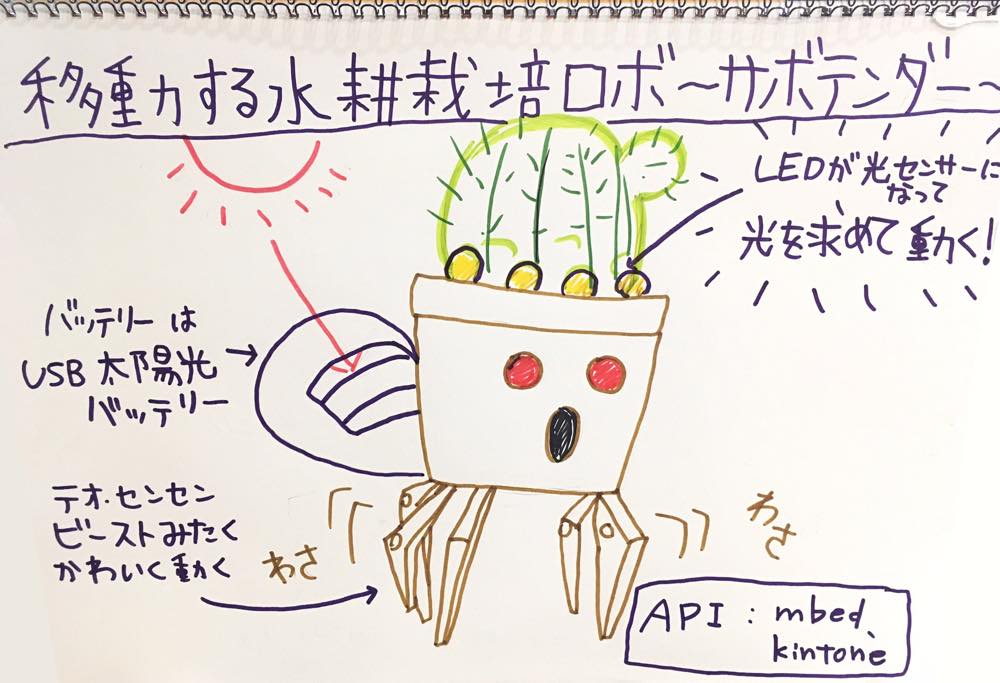
- ストーリー
-
- メンバー
-
-

- teach310 @teach310
-
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 サイコロを振るロボット「ECHO-Ro」
サイコロを振るロボット「ECHO-Ro」
-
 プライベート
プライベート
-
 ヒボたん 〜 移動式植物栽培ロボット 〜
ヒボたん 〜 移動式植物栽培ロボット 〜
-
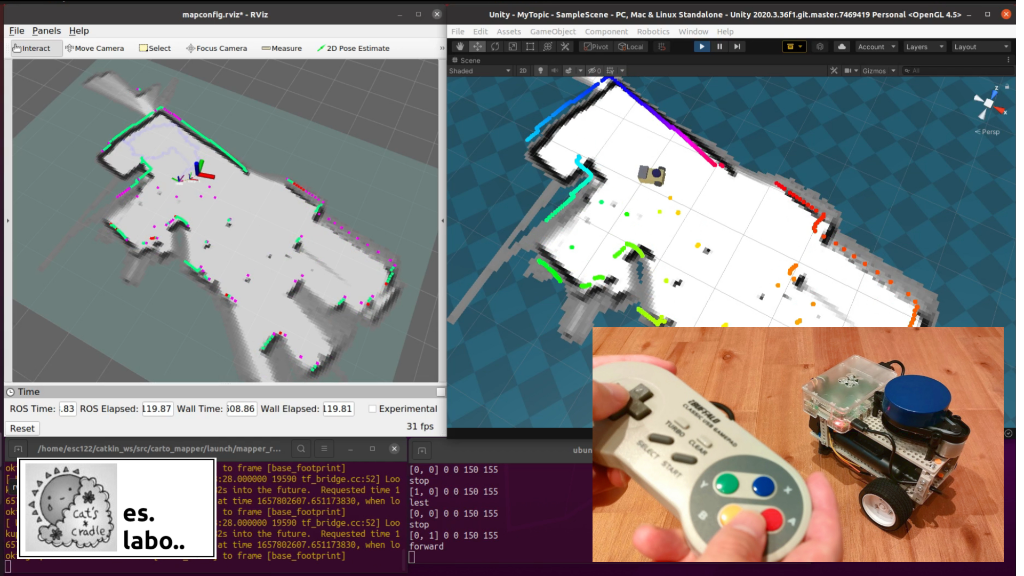 Raspberry Piロボットカー作成(遠隔操作・自動走行・SLAM・Unity同期)
Raspberry Piロボットカー作成(遠隔操作・自動走行・SLAM・Unity同期)
-
Proto lovers ♥