ワイングラス型スマートデバイス
完成
© CC BY 4+
236
三次元ジェスチャー感知ボードを使用して、ジェスチャーによるロボットの操作を行います。
新型コロナウィルスの感染を考慮して、非接触で操作できるようになっています。


- 動画
-
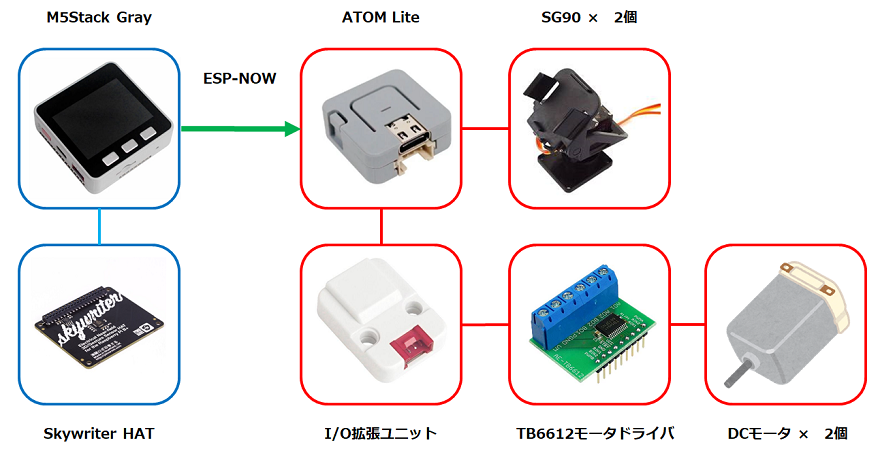
- 開発素材
- システム構成
-
- ストーリー
-
- メンバー
-
-

- あるば~と @albertlabo
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20212021-07-15 開催
M5Stack Japan Creativity Contest 20212021-07-15 開催
-
- 同じニオイがする作品
-
-
 スマートスピーカーで音楽を再生すると踊り出すロボ(PLEN5Stack - Alexa間の連携)
スマートスピーカーで音楽を再生すると踊り出すロボ(PLEN5Stack - Alexa間の連携)
-
 opniz
opniz
-
 ヒボたん ver.4 〜 移動式植物栽培ロボット 〜
ヒボたん ver.4 〜 移動式植物栽培ロボット 〜
-
 Future Flicking KeyBoard
Future Flicking KeyBoard
-
Proto lovers ♥