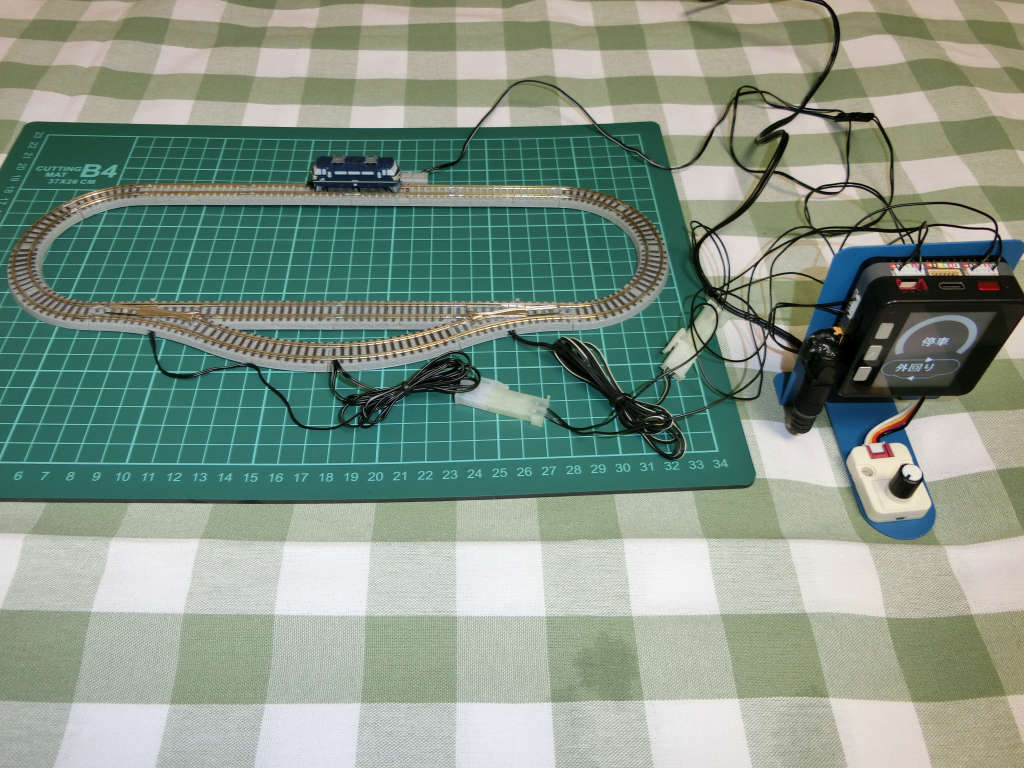
M5スタックを使った鉄道模型コントローラ
完成
© CC BY 4+
280
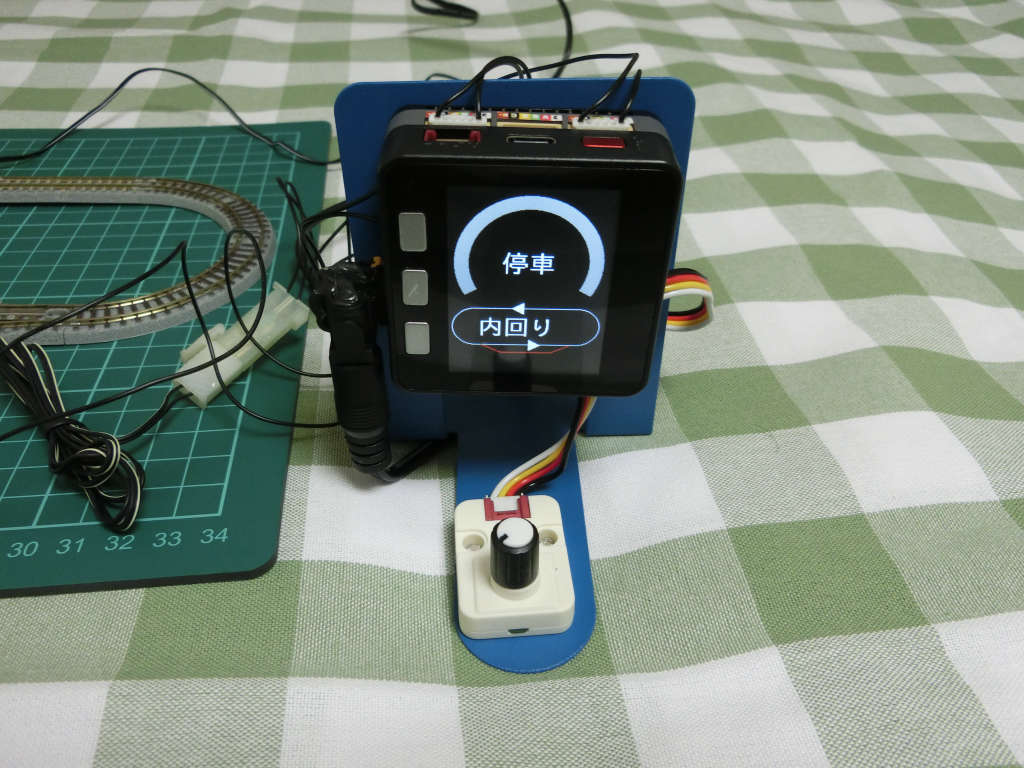
鉄道模型(今回はZゲージ)のコントローラをM5Stackを使って作成しました。
車両の進行方向と速度の制御に加えて、配置したレールのポイントの切り替えもM5Stackから可能になっています。


- 動画
-
- 開発素材
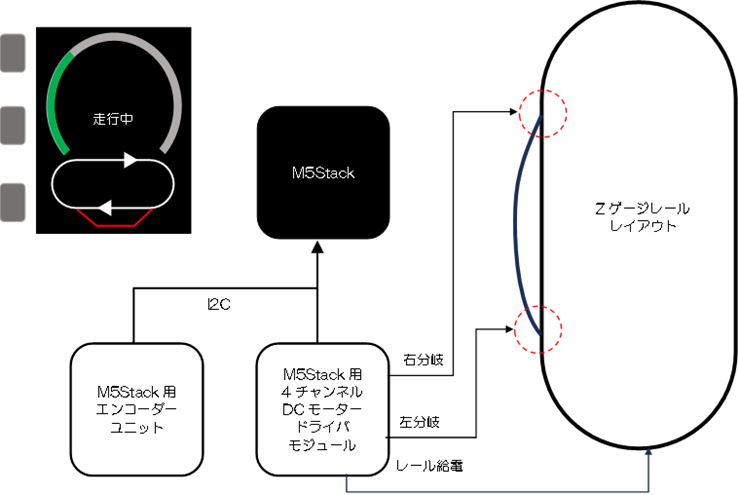
- システム構成
-
- ストーリー
-
- メンバー
-
-

- shaga @shaga
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20242024-06-01 開催
M5Stack Japan Creativity Contest 20242024-06-01 開催
-
- 同じニオイがする作品
-
-
 スパコーン
スパコーン
-
 OBごっこ (おぶごっこ)
OBごっこ (おぶごっこ)
-
 人造コックリさん
人造コックリさん
-
 SoleBell
SoleBell
-
Proto lovers ♥