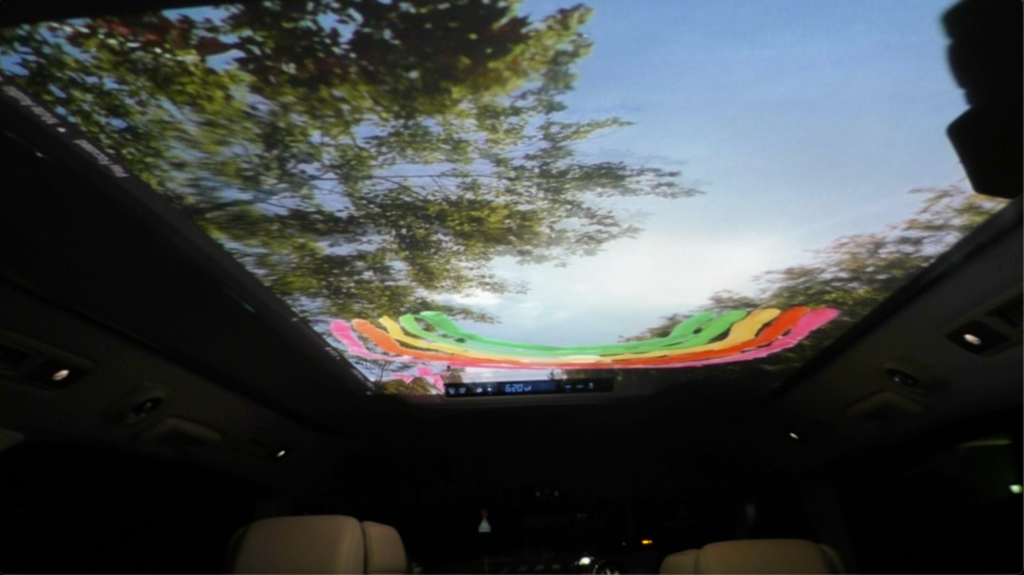
僕のクルマはオープンカー!?
完成
© CC BY 4+
433
クルマの動作(車速、ウインカON、ワイパON)に合わせてクルマの天井に映し出された空の風景動画が動きます。気分はまるでオープンカー、乗っている人みんなを爽快に盛り上げる、そんな発明です。
-
 ウキウキワクワクMyヒーロー賞 by テクニカルサポーターOBヒーローズ・リーグ 2023
ウキウキワクワクMyヒーロー賞 by テクニカルサポーターOBヒーローズ・リーグ 2023
-
 Unity賞 by ユニティ・テクノロジーズ・ジャパン株式会社ヒーローズ・リーグ 2023
Unity賞 by ユニティ・テクノロジーズ・ジャパン株式会社ヒーローズ・リーグ 2023

- 動画
-
- 開発素材
-
ツール
デバイス
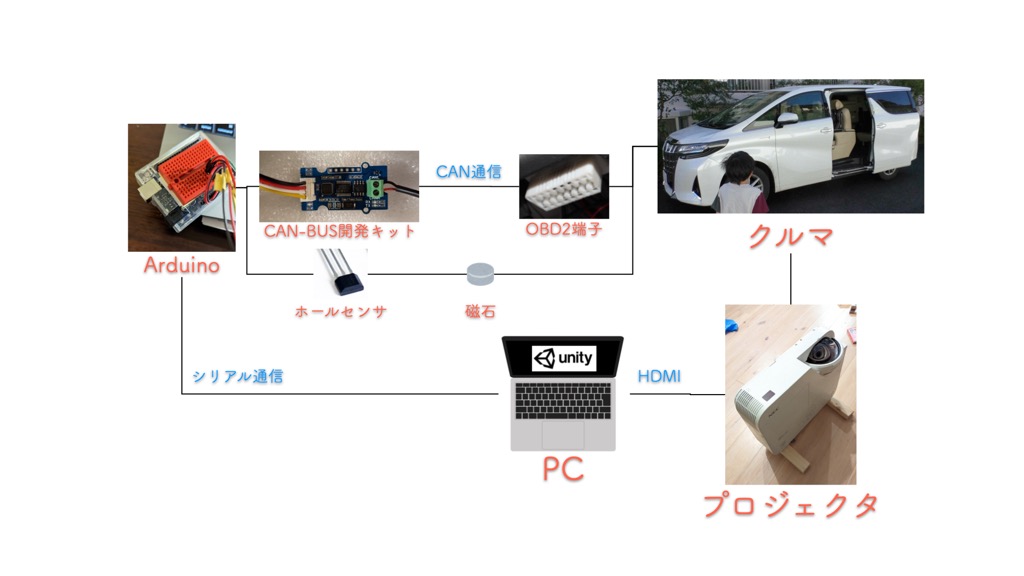
- システム構成
-
- ストーリー
-
- メンバー
-
-

- ISOイソ @kiryunomtber
-
-
- 関連イベント
-
-
 ヒーローズ・リーグ 20232023-08-28 開催
ヒーローズ・リーグ 20232023-08-28 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 世界で一番、プログラマっぽいCO2モニタ
世界で一番、プログラマっぽいCO2モニタ
-
 I am ☆ Star (アイ アム ア スター)
I am ☆ Star (アイ アム ア スター)
-
 釣りにArduino!M5StickCで投げ釣りの当たり判定システムを作る
釣りにArduino!M5StickCで投げ釣りの当たり判定システムを作る
-
 Tsu☆ぼやき
Tsu☆ぼやき
-
Proto lovers ♥







めっちゃいい!子供のセリフが棒読みなのもかわいいw
ありがとうございます! セリフを仕込ませた私も棒読みにウケてましたw
映像流してるだけでなくて、CANから情報取ってるんですね!すごい!
このクルマに乗りたい!いや、世界中のクルマにこの仕組みを搭載して欲しい!これならキャンプに行った先が雨だったとしても車内は快晴にできてみんなが幸せになれますね!
日常のドライブに非日常を持ち込む発想とそれを実現した技術力が素晴らしいですね。
天井にプロジェクションを行うだけですでに十分面白みがあるのですが、そこにARを加えることでより夢のあるプロジェクトとなっています。
今後の発展も楽しみにしています。