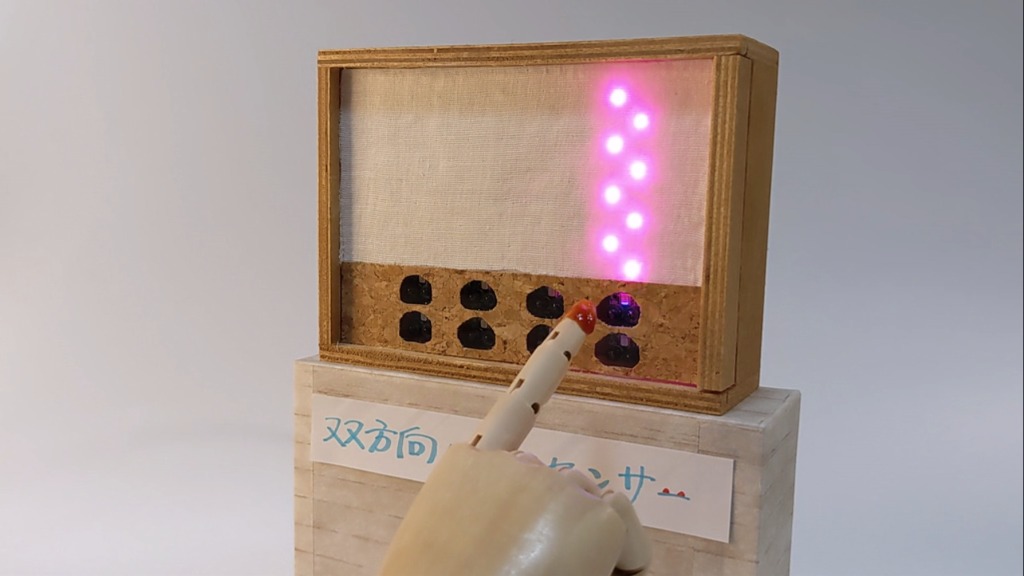
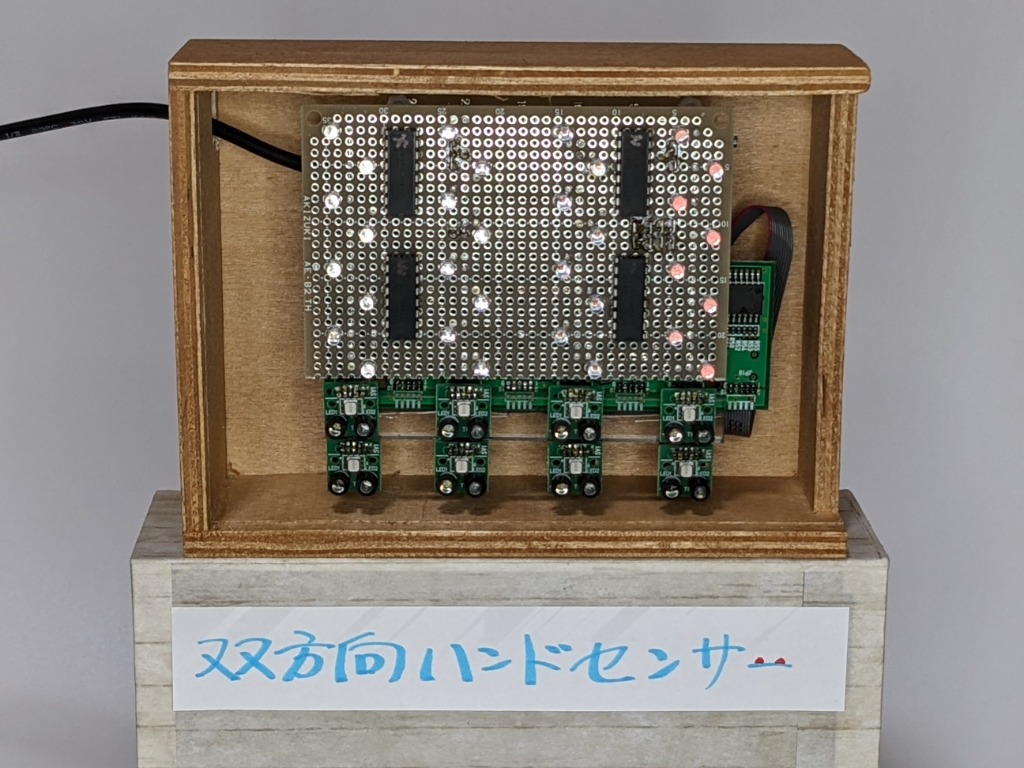
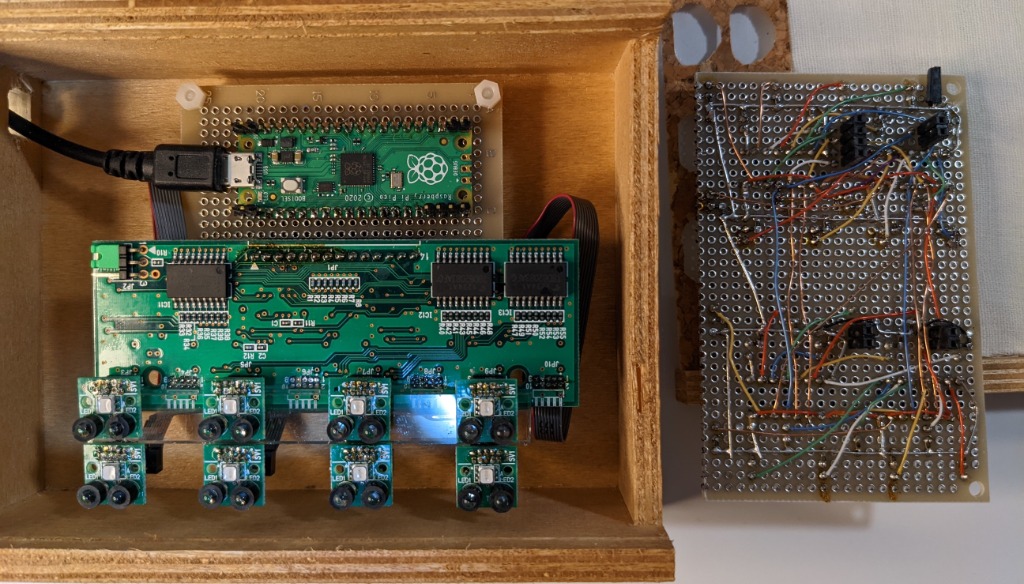
非接触N/8スイッチ
開発中
© CC BY 4+
266
2個のセンサーで誤検知防止する非接触スイッチ、ON/OFFの他に数値設定もできます。普通に使える衛生的なスイッチを日本から


- 動画
-
- 開発素材
-
デバイス
ツール
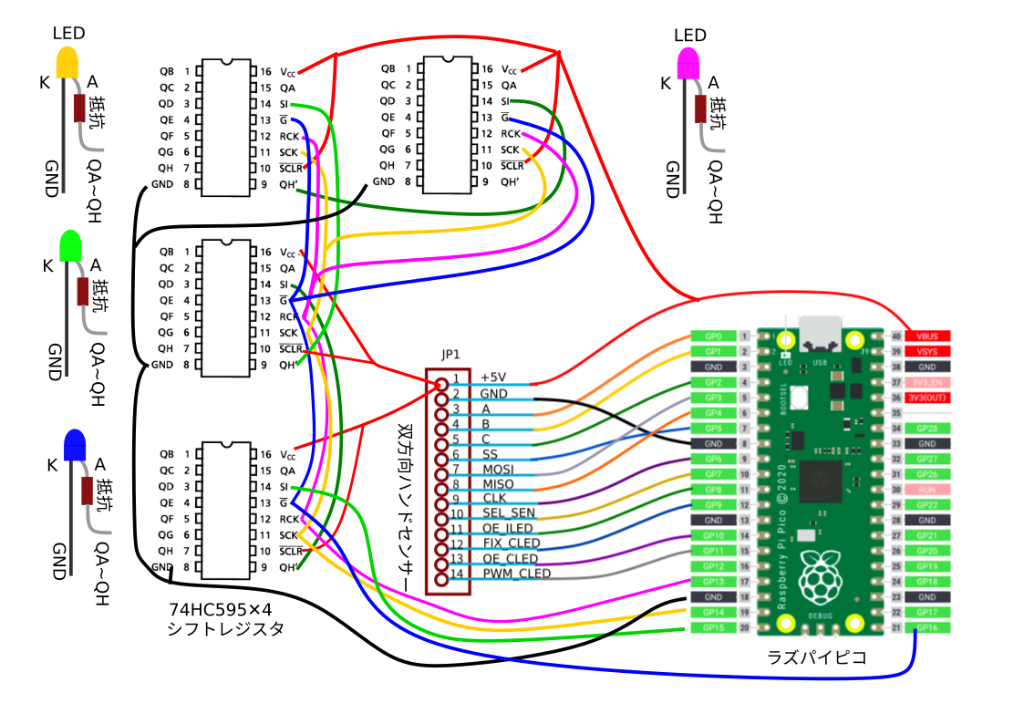
- システム構成
-
- ストーリー
-
- メンバー
-
-

- 前田高広 @3duilab
-
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 AIロボット草刈機 Roktrack2
AIロボット草刈機 Roktrack2
-
 ふくワン
ふくワン
-
 非接触空間センサーで創る3次元センシングシステム
非接触空間センサーで創る3次元センシングシステム
-
 reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
-