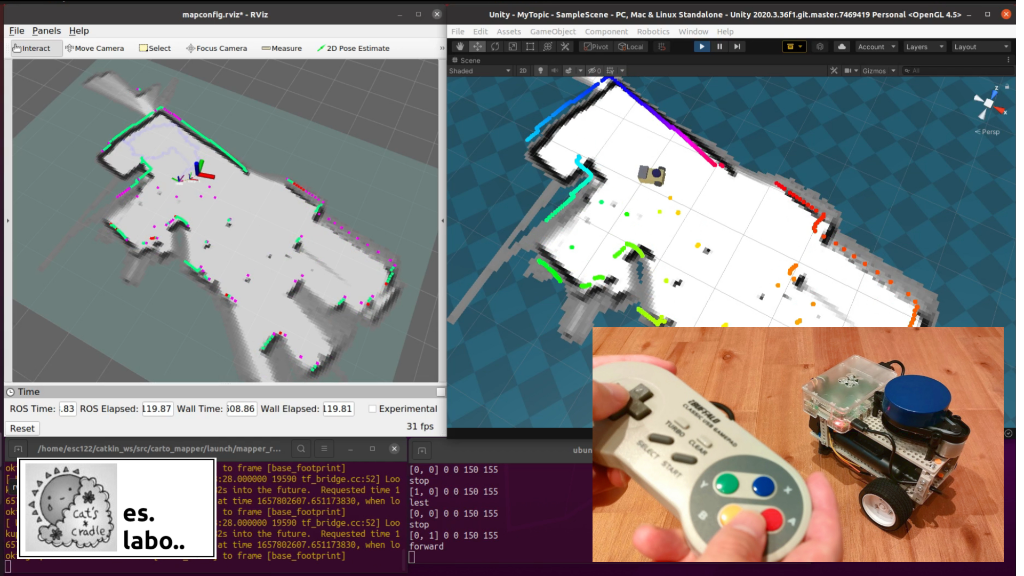
Raspberry Piのモーターを別PCから遠隔操作・自動走行します。LiDARセンサー取付けてSLAM(地図作成・自己位置推定)し、Unityでオブジェクトを同期。データのやり取りはROSで実行。
気に入った作品に「コメント」や「いいね」をして、作者にあなたの気持ちを伝えましょう!