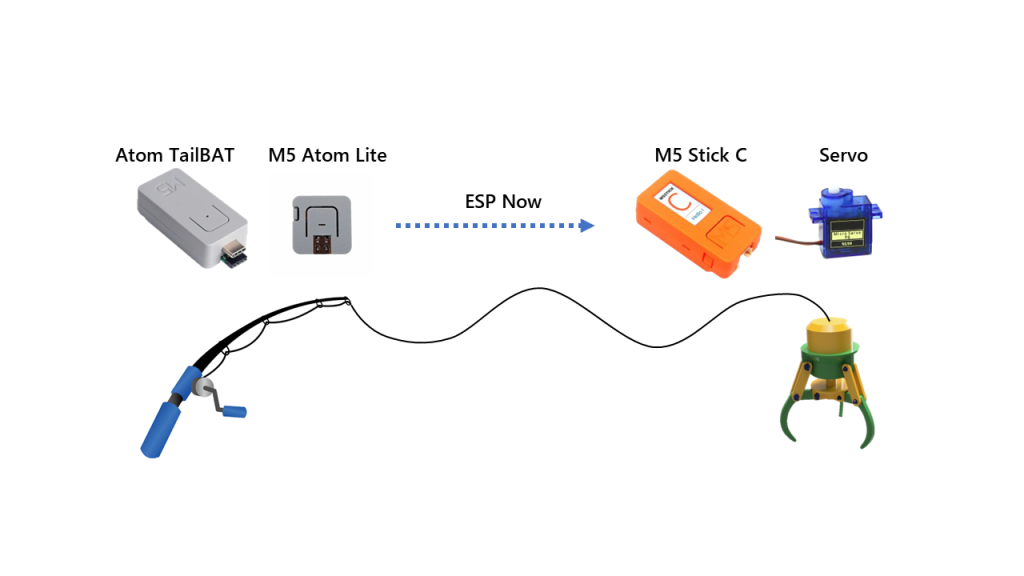
つかめる釣り竿
メンバー
はこ
@box5d
作品ページ