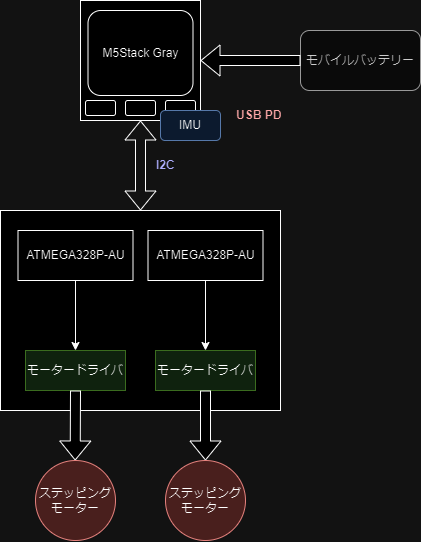
M5Stack倒立振子
メンバー
nop
@nop
作品ページ