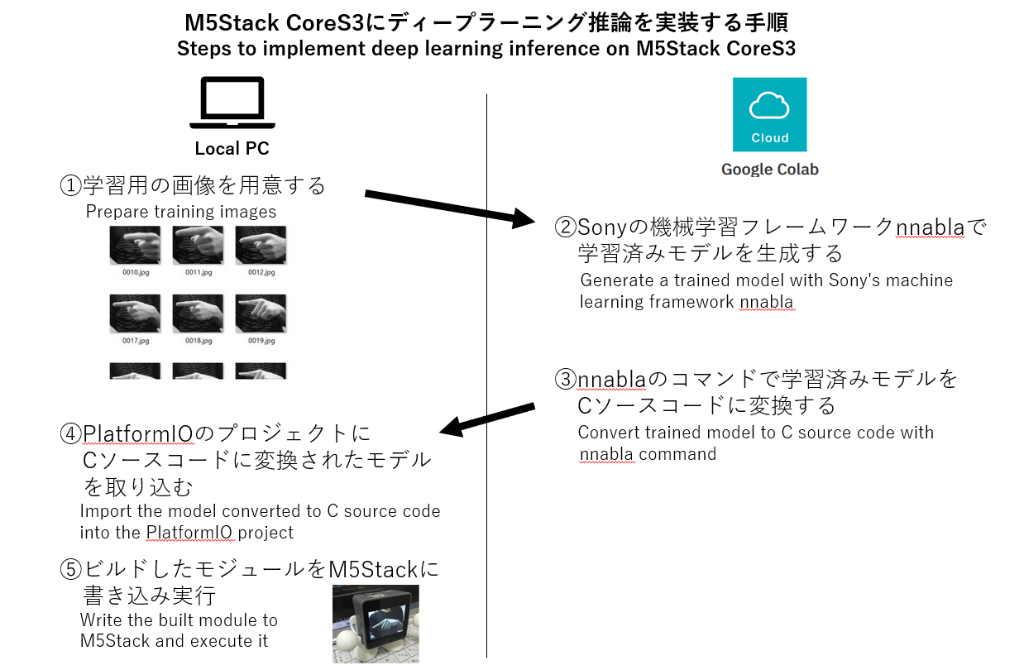
M5Stack CoreS3でディープラーニング推論
メンバー
motoh
@motoh0917
作品ページ