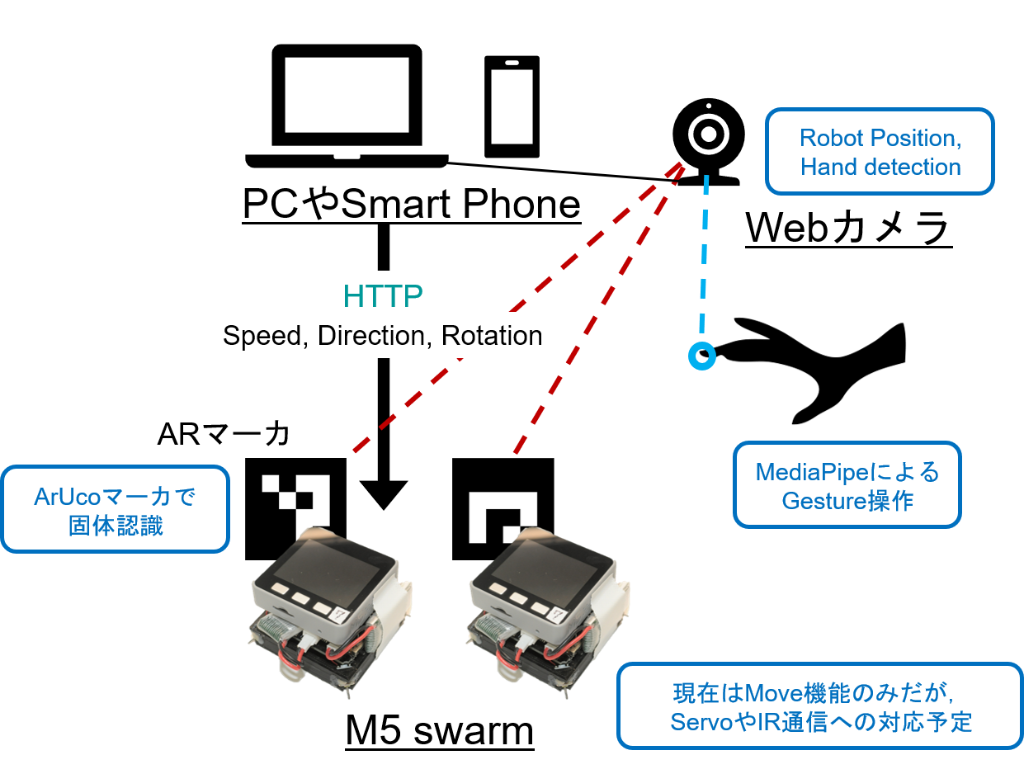
M5swarm
メンバー
ume-boshi
@bbt_dev
作品ページ